Dijkstra 算法


1.Dijkstra算法概述
Dijkstra算法是由荷兰计算机科学家狄克斯特拉(Dijkstra)于1959 年提出的,因此又叫狄克斯特拉算法。是从一个顶点到其余各顶点的最短路径算法,解决的是有向图中最短路径问题。

其基本原理是:每次新扩展一个距离最短的点,更新与其相邻的点的距离。当所有边权都为正时,由于不会存在一个距离更短的没扩展过的点,所以这个点的距离永远不会再被改变,因而保证了算法的正确性。不过根据这个原理,用Dijkstra求最短路的图不能有负权边,因为扩展到负权边的时候会产生更短的距离,有可能就破坏了已经更新的点距离不会改变的性质。
举例来说,如果图中的顶点表示城市,而边上的权重表示著城市间开车行经的距离。 Dijkstra算法可以用来找到两个城市之间的最短路径。
Dijkstra算法的输入包含了一个有权重的有向图G,以及G中的一个来源顶点S。 我们以V表示G中所有顶点的集合。 每一个图中的边,都是两个顶点所形成的有序元素对。(u,v)表示从顶点u到v有路径相连。 我们以E所有边的集合,而边的权重则由权重函数w: E → [0, ∞]定义。 因此,w(u,v)就是从顶点u到顶点v的非负花费值(cost)。 边的花费可以想像成两个顶点之间的距离。任两点间路径的花费值,就是该路径上所有边的花费值总和。 已知有V中有顶点s及t,Dijkstra算法可以找到s到t的最低花费路径(i.e. 最短路径)。 这个算法也可以在一个图中,找到从一个顶点s到任何其他顶点的最短路径。

2.Dijkstra算法基本思想
迪杰斯特拉(Dijkstra)算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。
它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
基本思想
在每个阶段,Dijkstra算法选择一个顶点v,它在所有未知顶点中具有最小的dv,同时声明从s到v的最短路径是已知的。阶段的其余部分由dw值的更新工作组成。
这里先明确两个集合:所有顶点集V和已选中顶点集S。
- 找到当前未选中点(V - S)中距离源点最近的点
- 更新未选中点到源点的距离
通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。
此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是”起点s到该顶点的路径”。然后,从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 然后,再从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 … 重复该操作,直到遍历完所有顶点。
操作步骤
(1) 初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为”起点s到该顶点的距离”[例如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
(2) 从U中选出”距离最短的顶点k”,并将顶点k加入到S中;同时,从U中移除顶点k。
(3) 更新U中各个顶点到起点s的距离。之所以更新U中顶点的距离,是由于上一步中确定了k是求出最短路径的顶点,从而可以利用k来更新其它顶点的距离;例如,(s,v)的距离可能大于(s,k)+(k,v)的距离。
(4) 重复步骤(2)和(3),直到遍历完所有顶点。
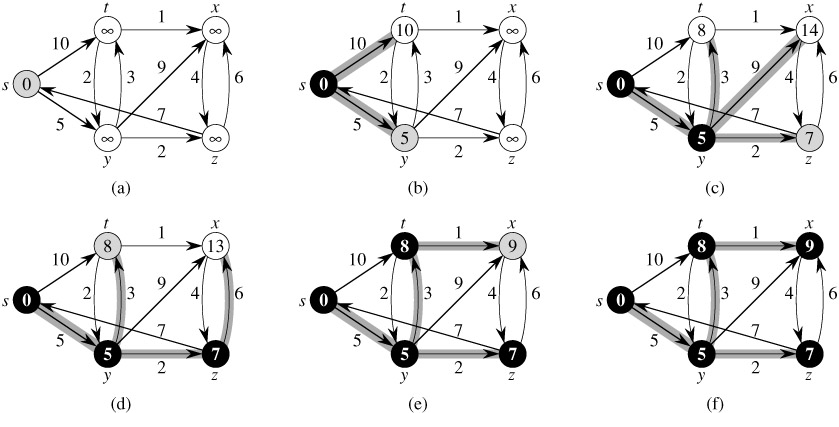
单纯的看上面的理论可能比较难以理解,下面通过实例来对该算法进行说明。
迪杰斯特拉算法图解
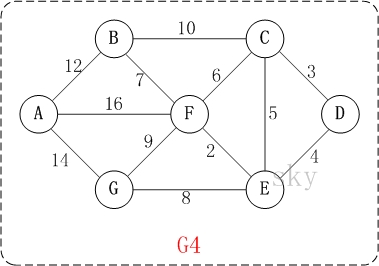
以上图G4为例,来对迪杰斯特拉进行算法演示(以第4个顶点D为起点)。
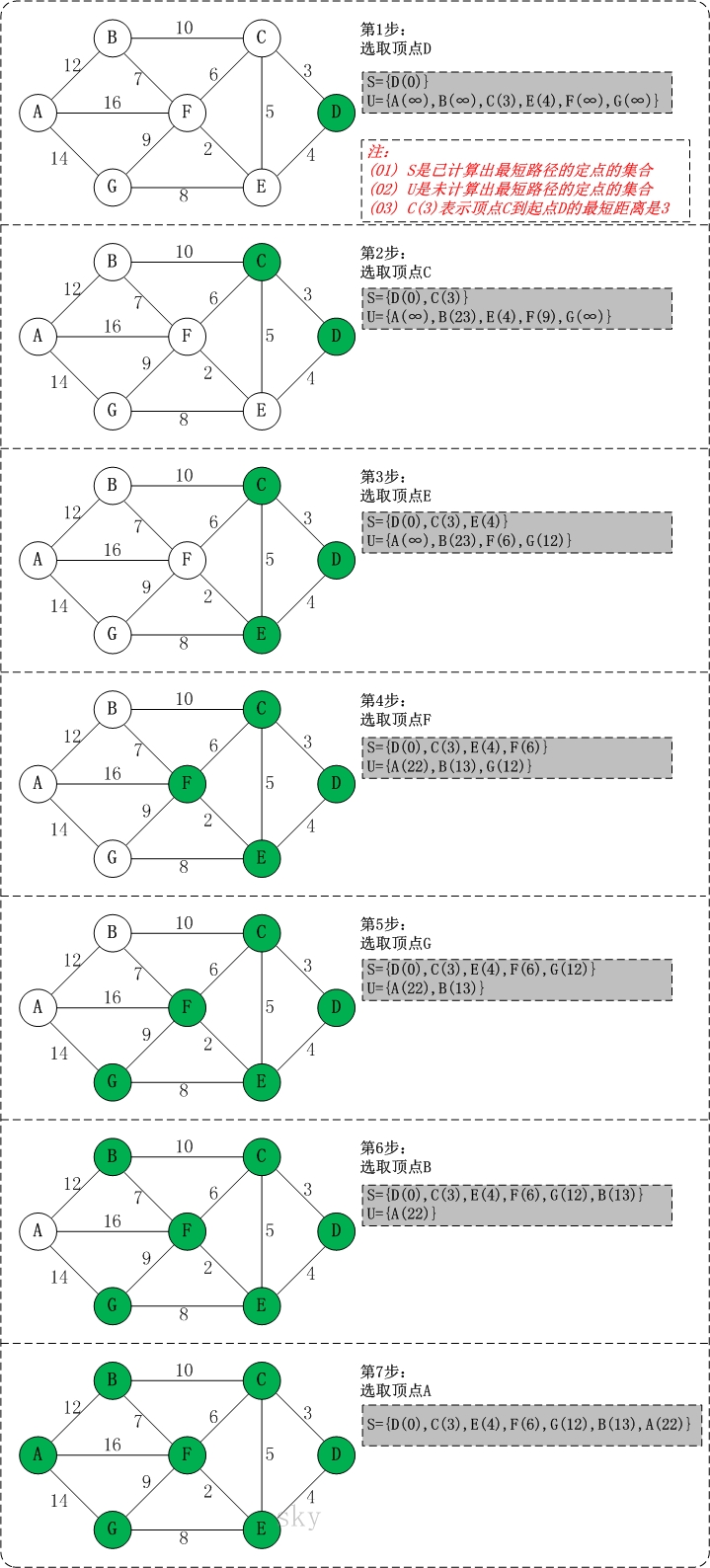
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!
第1步:将顶点D加入到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。 注:C(3)表示C到起点D的距离是3。
第2步:将顶点C加入到S中。
上一步操作之后,U中顶点C到起点D的距离最短;因此,将C加入到S中,同时更新U中顶点的距离。以顶点F为例,之前F到D的距离为∞;但是将C加入到S之后,F到D的距离为9=(F,C)+(C,D)。
此时,S={D(0),C(3)}, U={A(∞),B(23),E(4),F(9),G(∞)}。
第3步:将顶点E加入到S中。
上一步操作之后,U中顶点E到起点D的距离最短;因此,将E加入到S中,同时更新U中顶点的距离。还是以顶点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
此时,S={D(0),C(3),E(4)}, U={A(∞),B(23),F(6),G(12)}。
第4步:将顶点F加入到S中。
此时,S={D(0),C(3),E(4),F(6)}, U={A(22),B(13),G(12)}。
第5步:将顶点G加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12)}, U={A(22),B(13)}。
第6步:将顶点B加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13)}, U={A(22)}。
第7步:将顶点A加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13),A(22)}。
此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
3.核心代码
迪杰斯特拉算法的代码说明(c)
Dijkstra算法的声明
|
|
表初始化
|
|
显示实际最短路径
|
|
Dijkstra算法的伪代码
|
|
迪杰斯特拉算法的代码说明(java)
以”邻接矩阵”为例对迪杰斯特拉算法进行说明,对于”邻接表”实现的图在后面会给出相应的源码。
1. 基本定义
|
|
MatrixUDG是邻接矩阵对应的结构体。mVexs用于保存顶点,mEdgNum用于保存边数,mMatrix则是用于保存矩阵信息的二维数组。例如,mMatrix[i][j]=1,则表示”顶点i(即mVexs[i])”和”顶点j(即mVexs[j])”是邻接点;mMatrix[i][j]=0,则表示它们不是邻接点。
2. 迪杰斯特拉算法
|
|
4.时间复杂度
我们可以用大O符号将Dijkstra算法的运行时间表示为边数m和顶点数n的函数。
Dijkstra算法最简单的实现方法是用一个链表或者数组来存储所有顶点的集合Q,所以搜索Q中最小元素的运算(Extract-Min(Q))只需要线性搜索Q中的所有元素。这样的话算法的运行时间是O(n2)。
对于边数少于n2稀疏图来说,我们可以用邻接表来更有效的实现Dijkstra算法。同时需要将一个二叉堆或者斐波纳契堆用作优先队列来寻找最小的顶点(Extract-Min)。当用到二叉堆的时候,算法所需的时间为O((m+n)log n),斐波纳契堆能稍微提高一些性能,让算法运行时间达到O(m + n log n)。 相关问题和算法
在Dijkstra算法的基础上作一些改动,可以扩展其功能。例如,有时希望在求得最短路径的基础上再列出一些次短的路径。为此,可先在原图上计算出最短路径,然后从图中删去该路径中的某一条边,在余下的子图中重新计算最短路径。对于原最短路径中的每一条边,均可求得一条删去该边后子图的最短路径,这些路径经排序后即为原图的一系列次短路径。
OSPF([open shortest path first-开放最短路径优先)算法是Dijkstra算法在网络路由中的一个具体实现。
与Dijkstra算法不同,Bellman-Ford算法可用于具有负花费边的图,只要图中不存在总花费为负值且从源点 s 可达的环路(如果有这样的环路,则最短路径不存在,因为沿环路循环多次即可无限制的降低总花费)。
与最短路径问题有关的一个问题是旅行商问题,它要求找出通过所有顶点恰好一次且最终回到源点的最短路径。该问题是NP难的;换言之,与最短路径问题不同,旅行商问题不太可能具有多项式时间算法。
如果有已知信息可用来估计某一点到目标点的距离,则可改用A*算法,以减小最短路径的搜索范围。